
Manutention dalles chaudes
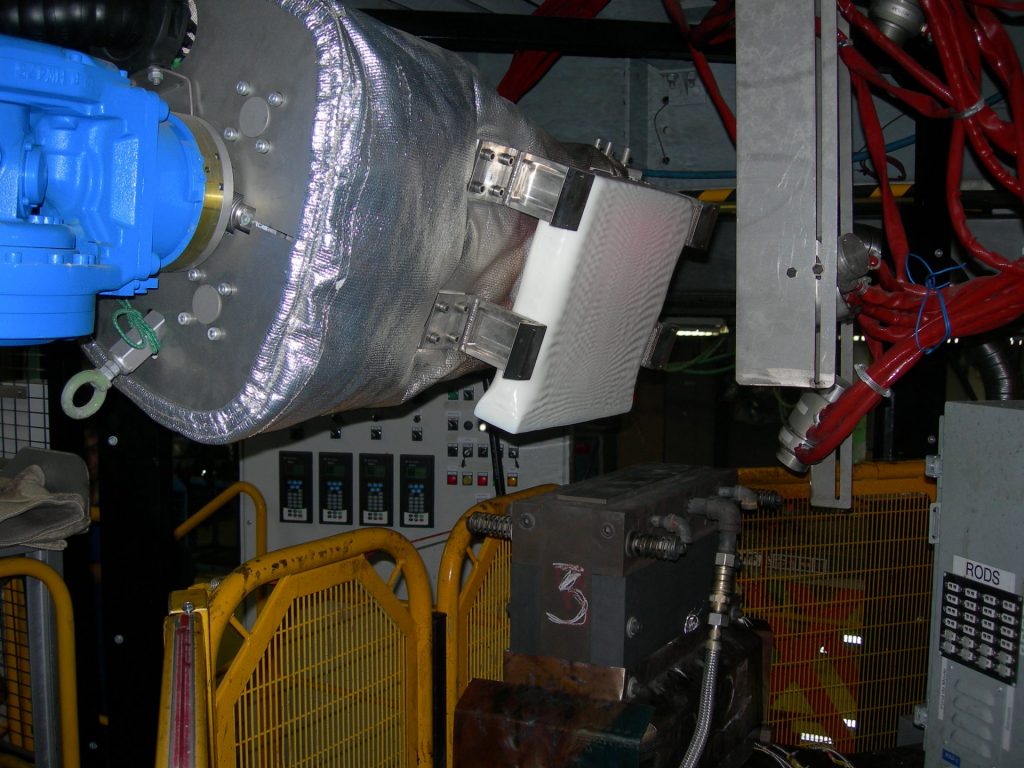
Cette machine a été conçue pour manutentionner des lopins de verre technique (céramiques) venant d'être coulés. L'objectif consiste à saisir le lopin à plus de 700°C en sortie de moule avant de le poser à l'entrée d'un four de recuit. La manipulation devant être courte pour limiter les chocs thermiques avec l'air. L'installation a été conçue pour évoluer dans un volume exigu. La machine est principalement constituée d'un robot polyarticulé 6 axes.
Description du cycle :
- Départ cycle sur pièce (lopin en position de prise),
- Approche du robot et pincement de la pièce,
- Présentation au conducteur de ligne pour approbation qualité,
- Transfert et positionnement vertical pour pesage,
- Introduction et dépose dans le four,
- Enfin, retour à la position parking.
Caractéristiques :
- La tête de préhension du robot est placée sous une housse multi-couches isolante.
- Un système de pesage est embarqué et permet une mesure sans lâcher la pièce : peson électronique.
- Un système de régulation de température est intégré dans la housse.
- Le contrôleur du robot est surveillé par un circuit électronique à triple redondance permettant le contrôle sûr de la trajectoire du robot et permettre une proximité des conducteurs de ligne sans protection supplémentaire.
- La machine est prévue pour manutentionner différentes formes de pièces parallélépipédiques ou cylindriques.
- Automatisme avec historisation et interfaçage TCP/IP avec mainframe.